

Matlab permite la creación rápida de prototipos de sistemas embebidos de regulación y control automático. Los bocetos de sistemas se pueden analizar en primer lugar en el PC. Como siguiente paso, es posible transferirlos y probarlos en el hardware real. Este tipo de aprendizaje basado en la simulación motiva y entusiasma.
Se pueden programar y probar sistemas de accionamiento con capacidad de funcionamiento en tiempo real con este método de diseño basado en modelos utilizados en la industria.
Metas de aprendizaje:
Implementación rápida de sistemas de procesador y hardware integrados en el bucle de control, personalizados y susceptibles de reconfiguración, por medio de generación automática de códigos
Ingeniería de algoritmos como medida para cerrar la brecha entre teoría y práctica
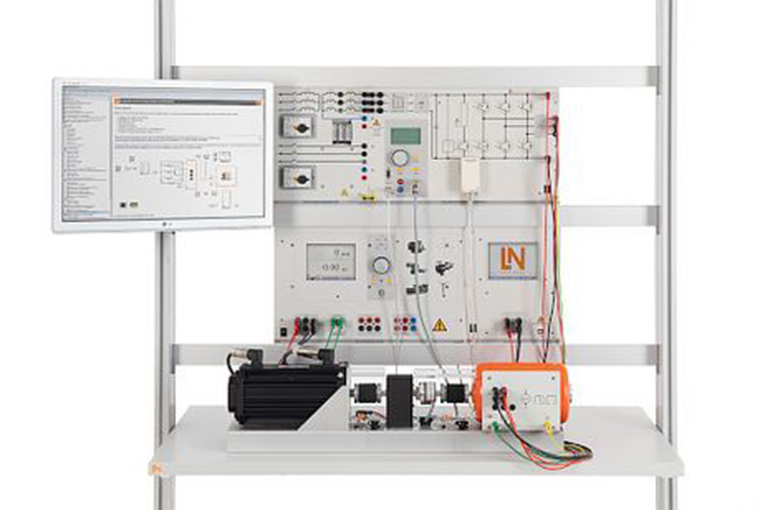
EPE 51-3 REGULACIÓN ORIENTADA AL CAMPO MAGNÉTICO DE MOTORES ASÍNCRONOS CON MATLAB - SIMULINK 300W
Metas de aprendizaje:
Metas de aprendizaje:
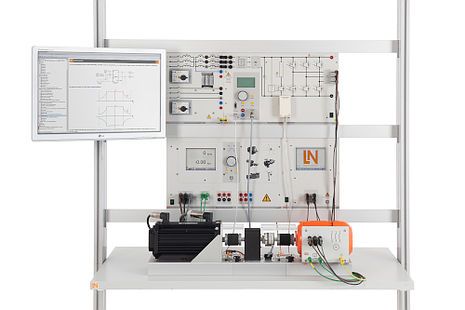
EPE 52-3 SERVOACCIONAMIENTO REGULADO DE IMÁN PERMANENTE CON MATLAB-SIMULINK 300W

Metas de aprendizaje:
Se pueden programar y probar sistemas de accionamiento con capacidad de funcionamiento en tiempo real con este método de diseño basado en modelos utilizados en la industria.
Metas de aprendizaje:
Implementación rápida de sistemas de procesador y hardware integrados en el bucle de control, personalizados y susceptibles de reconfiguración, por medio de generación automática de códigos
Ingeniería de algoritmos como medida para cerrar la brecha entre teoría y práctica
EPE 51-3 REGULACIÓN ORIENTADA AL CAMPO MAGNÉTICO DE MOTORES ASÍNCRONOS CON MATLAB - SIMULINK 300W
Metas de aprendizaje:
- Elaboración de un sistema HIL bajo condiciones de tiempo real
- Creación de modelos y bocetos de regulación orientada al campo magnético sobre un nivel de diseño continuo
- Conversión del control en valores discretos para funcionamiento con un procesador de señales digitales
- Elaboración y optimización de un regulador de corriente y número de revoluciones
- Transformación de Park y Clarke
- Integración de la modulación vectorial para el control óptimo de los IGBT
- Desacoplamiento de las corrientes y tensiones orientadas al campo magnético
- Determinación del número de revoluciones por medio de un sensor incremental
- Comparación de los resultados de la simulación con las mediciones reales
Metas de aprendizaje:
- Elaboración de un sistema HIL bajo condiciones de tiempo real
- Creación de modelos y bocetos de regulación en cascada para el motor de corriente continua sobre un nivel de diseño continuo
- Conversión del control en valores discretos para funcionamiento con un procesador de señales digitales
- Elaboración y optimización de un regulador de corriente y número de revoluciones
- Determinación del número de revoluciones por medio de un sensor incremental
- Comparación de los resultados de la simulación con las mediciones reales
EPE 52-3 SERVOACCIONAMIENTO REGULADO DE IMÁN PERMANENTE CON MATLAB-SIMULINK 300W
Metas de aprendizaje:
- Elaboración de un sistema HIL bajo condiciones de tiempo real
- Creación de modelos y bocetos de servorregulación sobre un nivel de diseño continuo
- Conversión del control en valores discretos para funcionamiento con un procesador de señales digitales
- Elaboración y optimización de un regulador de corriente y número de revoluciones
- Transformación de Park y Clarke
- Integración de la modulación vectorial para el control óptimo de los IGBT
- Desacoplamiento de las corrientes y tensiones orientadas al campo magnético
- Determinación del número de revoluciones y de posición por medio de un sensor incremental
- Comparación de los resultados de la simulación con las mediciones reales


